
수행기록퀘스트3
<NoLoad_DcMotor시스템에 대한 동역학 선형 방정식 유도 및 simulink를 이용한 시뮬레이션 결과>
|---R---L-----------| | Torque, theta
+ + V
V e Motor --- rotor
- - ^ b*theta_dot(inertia= J)
|____________________|
No loaded DC모터 구조에서 다음과 같은 기본 관계식을 유도한다.
모터 회로에 전류를 흘리면 모터 양단에 역기전력이 발생하면서 토크가 유발된다.
모터 토크는 모터에 흘리는 전류에 비례하기 때문에 T=Kt*i 로 표현한다.
T = K * Phi(flux)*ia (Phi 는 electro-magntic-field flux값이며 전선감은수에 비례하므로 상수)
= Kt * i
전류 성분에 의해 기계적인 토크가 나오게 되는 수식.
모터 양단에 걸리는 전압인 역기전력(BackEMP)는 토크 방향과 동일한 방향으로 움직이는 각속도(w(Omega) = dot_theta)에 비례하므로
E = K*n*Phi -> K(상수) * 속도 * 전기장(상수) -> flux Phi는 전기장을 만들기 위해 사용한 권선수이고 변하지 않으므로 고정 상수임. K와 Phi를 모두 상수이므로 다음처럼 표현가능함.
e = Ke * w = Ke * theta_dot
(where w = 2*pi*n(회전수)/60 -> 분당 회전수)
즉 기계적인 각속도 성분에 의해 전압이 유도되는 수식.
위 식에서 Kt = Ke 라는 관계가 성립하므로 Kt = Ke = K 로 표현하자.
위 두 관계 수식에 의해 전기성분<->기계적 동역학 성분이 표현되는 electromecanical equation이 유도된 셈이다.
이제부터는 주어진 DC모터 회로와 기계적인 구조에 대하여
뉴턴의 제2법칩과 키르히호프 전압 법칙을 이용하여 No_Load에서의 역학 수식을 유도한다
summation T = J*alpha
T - b*theta_dot = J*theta_ddot;
이렇게 되고 라스플라스 변환을 해서 다음과 같이 전달함수를 유도해야한다.
Laplace transformation에서 미분성분은 다음과 같이 변형된다.
theta_dot -> s*theta, theta_ddot -> s^2 * theta
첫번째로 위에서 적은 inertia와 Torque의 관계식의 Lapalce변환은 다음과 같다(1번식)
J*theta_ddot + b*theta_dot = K*i = T
-> s*(Js + b)*theta(s) = K*i(s) = T(s) ---(1)
회로이론 기초인 키르히호프 법칙에서 유도된 전압 방정식을 라플라스 변환하면
L*di/dt + R*i = V - e = V - K*theta_dot
-> (L*s + R)*i(s) = V(s) - K*s*theta(s) ---(2)
위 처럼 됨을 알 수 있다.(2번식)
위 1번식과 2번식 두 방정식에서 입력전압에 대한 각속도의 전달함수를 구하기 위해 공통인자 i(s)를 제거하면
theta(s)/V(s) = K/((J*s+b)*(L*s+R)+K^2) [(rad/sec) / V]
와 같은 전달함수가 유도할 수 있다.
우리가 원하는 입력전압에 대한 각속도의 출력을 확인해 볼 수 있게 되는 전달 함수 식을 구한 것이다.
이제 위 전달함수식을 simullink 전달함수 박스에 기록하여 시뮬레이션을 하면 다음과 같다.
초기화 값은 V_in=24V, b = 0.1, J=0.01, L=0.5, K=0.01, R=1로 설정하였고
위 No-Load DC-motor 시스템에 대한 회전각 응답 특성수식을 다음과 같이 적용하였다.
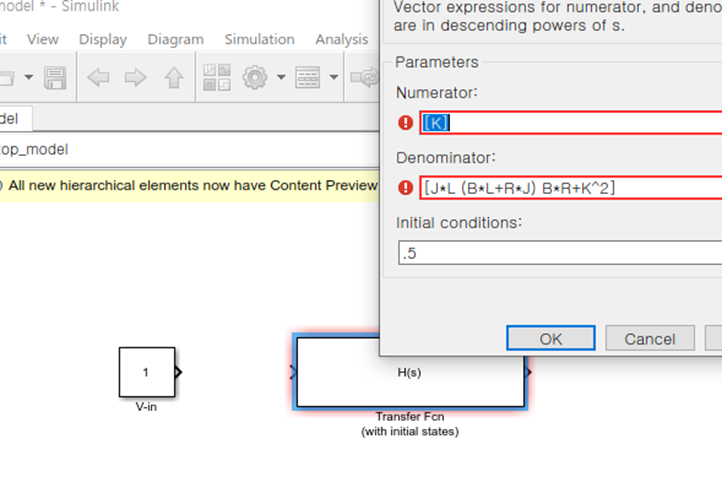
1(시뮬링크 전달함수 박스에서 전달함수 인자들을 기록하는 그림)
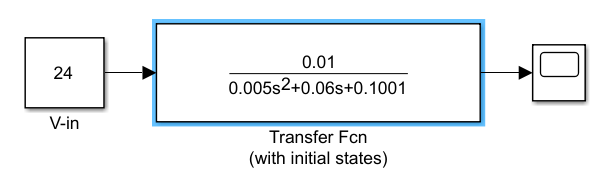
2(시뮬링크 전달함수를 모두 기입후 초기화 값을 넣고서 Run을 누르면 위처럼 값들이 표시된다)
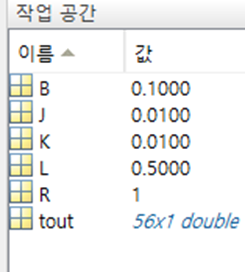
3(변수에 대하여 초기화값으로 기입한 값들 사진)
시뮬레이션한 결과 그래프는 다음과 같다
.png)
4(시뮬링크 결과 그래프 사진)
위 그래프 결과를 보면 위에서 유도한 DC 모터 선형 방정식은 24V 인가했을 때 2.4 rad/sec의 속도로
회전할 것이라는 것을 알 수 있다. 단 무부하(No-Load) 조건에 대한 결과이다.
만약 부하조건이라면 시스템 방정식을 다시 구해서 시뮬레이션 해야 할 것이다
- 첨부파일
- no_load_dc_motor1_simulink.zip 다운로드
로그인 후
참가 상태를 확인할 수 있습니다.