커뮤니티
- 제 목 라즈베리파이 초음파 센서 ( HC-SR04 ) 제어
- 작성자 네오즈 조회 : 13,811 좋아요 : 0 댓글 : 0
- 작성일 2019-09-27 오후 3:44:01
-
1. 초음파센서 테스트 회로 구성
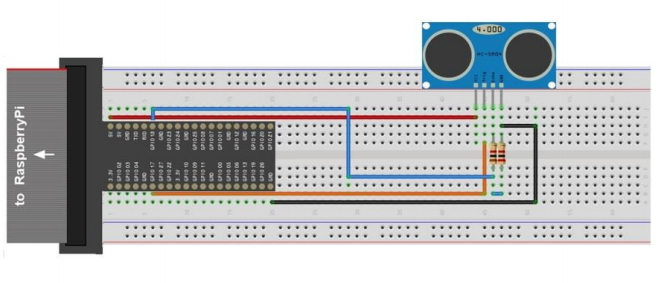
( HC-SR04 초음파 센서 1EA, , 1KΩ 저항 1EA Echo연결, 2KΩ 저항 1EA GND 연결 )
Trig: GPIO 17번 연결, Echo: GPIO 18번 연결
주의사항 : echo 핀에 High level 신호 발생시 5V를 전송 하게 된다. 그러나 라즈베리파이는 3.3V로
작동되므로 라즈베리파이 손상을 방지하기 위해 1KΩ, 2KΩ 저항으로 3.3V로 낮춰줘야 한다.
코드 작성 및 실행 방법은 " 라즈베리파이 GPIO 포트 ( LED, 버튼 ) 제어 " 가이드 참조
2. 초음파센서 테스트 Python 코드
초음파가 물체에 부딪쳐 반사되어 돌아오는데 까지 걸리는 시간을 측정하여 물체의 거리를 계산한다.
import RPi.GPIO as GPIO # RPi.GPIO에 정의된 기능을 GPIO라는 명칭으로 사용 import time # time 모듈 GPIO.setmode(GPIO.BCM) # GPIO 이름은 BCM 명칭 사용 GPIO.setup(17, GPIO.OUT) # Trig=17 초음파 신호 전송핀 번호 지정 및 출력지정 GPIO.setup(18, GPIO.IN) # Echo=18 초음파 수신하는 수신 핀 번호 지정 및 입력지정 print “Press SW or input Ctrl+C to quit” # 메세지 화면 출력 try: while True: GPIO.output(17, False) time.sleep(0.5) GPIO.output(17, True) # 10us 펄스를 내보낸다. time.sleep(0.00001) # Python에서 이 펄스는 실제 100us 근처가 될 것이다 GPIO.output(17, False) # 하지만 HC-SR04 센서는 이 오차를 받아준다 while GPIO.input(18) == 0: # 18번 핀이 OFF 되는 시점을 시작 시간으로 잡는다 start = time.time() while GPIO.input(18) == 1: # 18번 핀이 다시 ON 되는 시점을 반사파 수신시간으로 잡는다 stop = time.time() time_interval = stop – start # 초음파가 수신되는 시간으로 거리를 계산한다 distance = time_interval * 17000 distance = round(distance, 2) print “Distance => “, distance, “cm” except KeyboardInterrupt: # Ctrl-C 입력 시 GPIO.cleanup() # GPIO 관련설정 Clear Print "bye~"3. 초음파센서 테스트 C코드
#include <stdio.h> // stdio.h 파일 포함( printf() 사용하기 위해 ) #include <wiringPi.h> // wiringPi.h 파일 포함 int main(void ) { Float distance, start, stop; wiringPiSetup(); // wiringPi 기준으로 PIN 번호 매김 pinMode(0, OUTPUT); // wiringPi GPIO 0번 = Python(BCM) 17번 pinMode(1, INPUT); // wiringPi GPIO 1번 = Python(BCM) 18번 while(1) { digitalWrite(0,0); // wiringPi 0번핀을 Low로 출력 digitalWrite(0,1); // wiringPi 0번핀을 High로 출력 delayMicroseconds(10); // 10마이크로초 동안 멈춘다 digitalWrite(0,0); while(digitalRead(1) == 0) // wiringPi 1번핀을 Low일 경우 start = micros(); // 마이크로초 저장 while(digitalRead(1) == 1) // wiringPi 1번핀을 High일 경우 stop = micros(); // 마이크로초 저장 distance = (stop – start) / 58; // 시간의 차이를 이용하여 거리를 도출한다 printf(“Distance=> %2f cm \n”,distance); delay(1000); } return 0; }